
关键技术,中国原创
在单孔微创手术中,一支内窥镜和三支手术器械须经同一皮肤切口进入病患体腔。内窥镜须集成照明功能并实现术野的灵活调整,而手术器械须兼顾运动的范围、精准性、灵巧度以及足够的力度。相比于多孔微创手术,单孔腔镜手术器械的排布更加拥挤、内窥镜及手术器械的驱动传动布置更加困难,还要保证临床使用的功能性和可靠性,因此,单孔腔镜手术机器人的研发面临着重大的技术挑战。
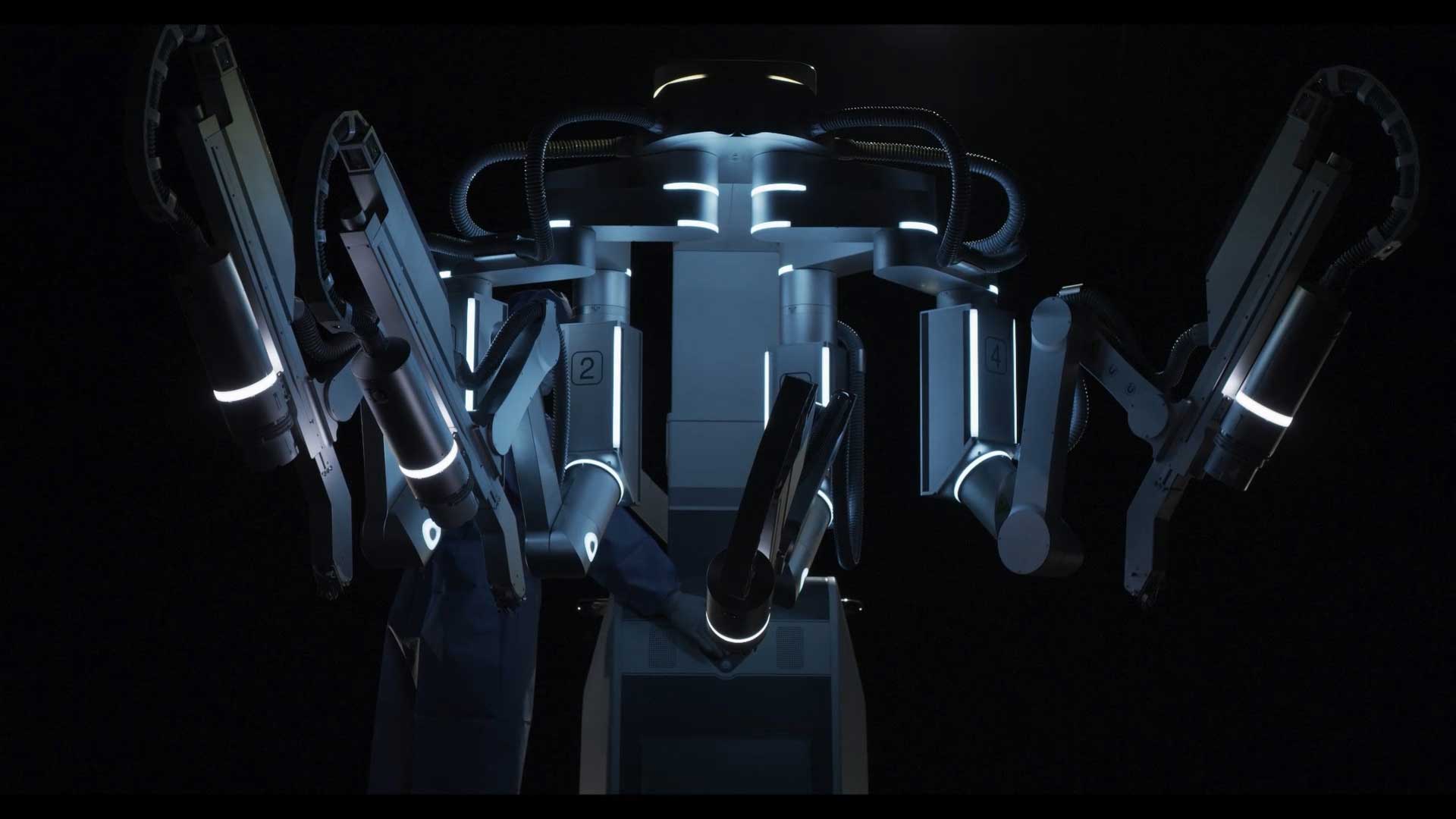
绝大多数单孔腔镜手术机器人采用的设计范式是定位机械臂配合具备全维运动能力的手术器械。如下图所示,定位机械臂在术中操作时静止,其作用是把递送内窥镜和手术器械的多通道鞘管举抬至所需位姿。内窥镜和手术器械可展开为工作姿态进行手术。
 |
在这种范式下,内窥镜和手术器械通过多通道单孔鞘套进入病患体腔,驱动手术器械实现大范围、大负载、高可靠的运动成为最关键的技术。
为实现安全有效的单孔腔镜机器人手术,学术界和产业界尝试了各种技术途径,包括钢丝驱动、电机内置驱动、空间连杆驱动、远心运动机构等。但这些技术途径都有着其自身的缺陷,限制了其在临床手术中的应用。
革命性的面向连续体机构的形变驱控技术
术锐®机器人的手术器械和三维电子内窥镜的蛇形臂体均采用了原创自主的核心技术“面向连续体机构的形变驱控技术”设计。如图所示,可形变连续体机构由近端构节、导向钢管束以及远端构节组成,超弹性镍钛合金细杆作为结构骨从头至尾贯穿。近端构节的弯转,会带来十余根结构骨的推拉运动,这些推拉运动传递到远端构节,协同将远端构节向相反的方向弯转。采用双构节“面向连续体机构的形变驱控技术”设计的手术器械,可将近端构节的驱动电机布置在病人体外,而病人体内的远端构节可在十余根结构骨协同推拉下实现双构节、八方向弯转的灵活运动。
“面向连续体机构的形变驱控技术”具有诸多优势:十余根结构骨可同时承受推力和拉力,手术器械蛇形臂体的负载能力显著提高;结构骨冗余布置,其中一根断裂,对手术器械的整体性能几乎没有影响,安全性极高;蛇形臂体具有连续弯曲形变特性,可轻易通过复杂形状腔道,灵活满足单孔手术下各种运动需要。
 | ||
与传统的多关节刚性机器人结构不同,“面向连续体机构的形变驱控技术”力学性质复杂、形变模态多样;为实现精准的运动控制,建模时须考虑多种非线性力学的耦合效应,还需满足实时高效计算的运算要求,是门槛极高的系统化关键技术。针对“面向连续体机构的形变驱控技术”的运动控制难点,术锐股份经过数年的技术探索和积淀,独创了弹动力学复合模型,兼顾了耦合效应的补偿机制和轻量解析的运算结构,使其运动控制性能达到国际领先水平。“面向连续体机构的形变驱控技术”控制算法精准驾驭蛇形手术臂的运动控制,为医生提供精细流畅的操作体验。

 重要提示信息
重要提示信息北京术锐机器人股份有限公司的腹腔内窥镜单孔手术系统(“术锐®机器人”)于2023年6月获得国家药品监督管理局(NMPA)的上市批准(注册证号:国械注准20233010833),用于泌尿外科腹腔镜手术操作。医生若希望学习术锐®机器人的手术操作,请联系北京术锐机器人股份有限公司,参加术锐的官方培训计划。患者若想参加术锐®机器人的注册临床试验,请联系术锐官方合作医院,咨询医生,以确定是否适合术锐®机器人的手术。医生和患者应仔细了解有关术锐®机器人执行手术及其可能风险的所有信息。
术锐®、SHURUI®等是北京术锐机器人股份有限公司所拥有的注册商标,未经许可,不得使用。




 EN
EN